移动基站是一种业内新兴的动态RTK测量手段,它类似于传统意义上的RTK和DGNSS技术,不同处在于基站是处于移动的状态。
这项技术对于GNSS接收机的要求较高,相对精度可以达到厘米级,取决于两台接收机之间的距离,移动基站的加速度及差分龄时。
Septentrio接收机支持该项应用,需开通Movingbase选项。
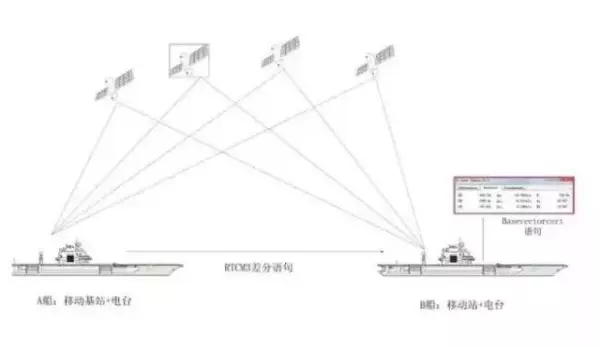
现海上有A,B两船,需求出B相对于A的实时三维位置。
如图所示
① 在A船放置1台Septentrio接收机作为移动基站(Movingbase),安装好GPS天线及线缆;
② 在A船放置1个发送电台(如iNET300),安装好电台天线及线缆;
③ 连接接收机的com2口与发送电台的com2口
④ 正常设备设备后供电,设置Septentrio接收机通过com2实时发送rtcm3差分语句
⑤ 在B船放置1台Septentrio接收机作为移动站(Rover),安装好GNSS天线及线缆;
⑥ 在B船放置1个接收电台(如iNET300),安装好电台天线及线缆;
⑦ 连接接收机的com2口与接收电台的com2口
⑧ 正常设备设备后供电,设置Septentrio接收机通过com2实时接收rtcm3差分语句
⑨ Septentrio接收机实时计算rtcm3语句,得出B船相对于A船的相对位置数据,数据为Basevectorcart和Basevectorgeod,这两项数据里面有实时的B船相对于A船在三维方向(XYZ)上的值,精度可达厘米级
⑩ B船用户可以通过com1实时记录该语句,或将语句通过电台回传等操作
文章转自创宇星通,本文编辑杨文正